
纯电动汽车整车控制器CAN通讯协议研究
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
纯电动汽车整车控制器CAN通讯协议研究(任务书,开题报告,文献摘要,论文说明书30000字)
摘要
随着科学技术的快速进步,传感器技术、电子技术、计算机控制技术的发展和人们对汽车性能的要求越来越高,现代汽车上装备的电器与电子设备、传感器、计算机控制单元不断增加。汽车综合控制系统中大量的控制信号需要实时交换与处理,传统的线束已经远远不能满足这种信息传输要求,因而汽车局域网应运而生。
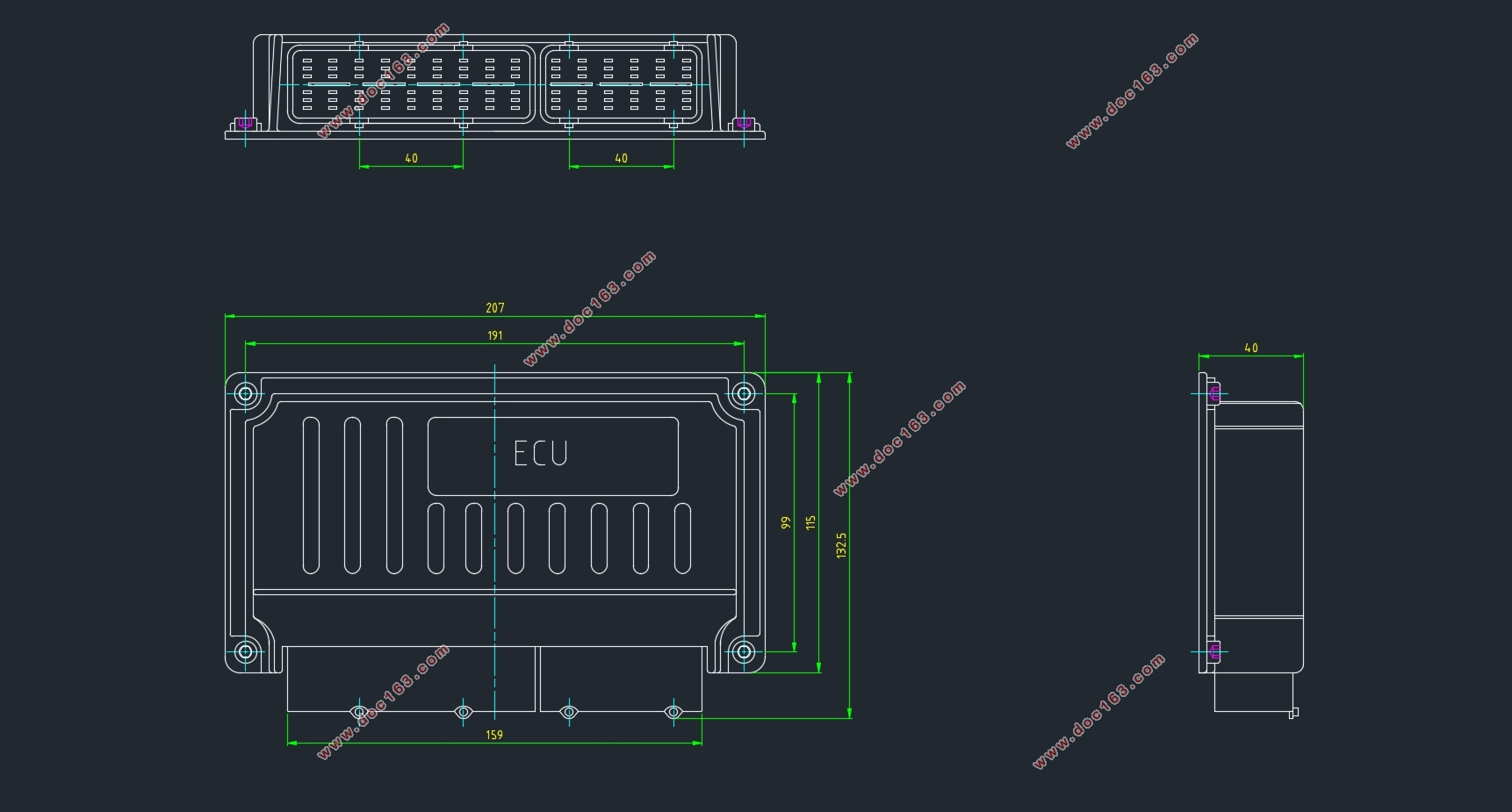
控制器局域网CAN(Controller Area Network)总线是现场总线的一种,被广泛的应用于汽车、航天、医疗设备以及工业控制等分布式控制领域。CAN 只定义了数据链路层和物理层,而标准化应用层的工作仍在进行中。近年来CAN总线已发展成为车载网络系统的主流总线,并有基于CAN总线通信协议的车辆应用层协议通讯标准SAE J1939。J1939协议是美国汽车工程师协会SAE(Society of Automotive Engineer)发布的,以CAN2.0B作为网络核心的车辆网络串行通信和控制协议。J1939已成为目前大型客车和商用车中采用最多的一种通讯协议。SAE J1939是一个高速通迅网络,用来支持分布在车辆中各个不同位置电控单元之间实现实时闭环控制。SAE J1939协议内容主要包括SAE J1939-21数据链路层子协议、J1939-71应用层子协议和SAE J1939-81网络管理层子协议。阐明了J1939中的标识符格式和用法,三种通信方式等。
[资料来源:http://think58.com]
本文首先从纯电动车的整车控制器入手,概述了整车控制器的结构组成,工作模式和功能需求,接着介绍了CAN总线的发展历史,六大技术特点以及CAN总线网络分层和报文传输,对帧格式和数据错误检测作了较为详尽的描述。第3章详细分析了J1939各个层次:物理层、数据链路层、网络管理层和汽车应用层;参考J1939 协议,设计和实现了汽车网络控制控制系统CAN高层协议并编写了CAN收发程序。最后用LabVIEW进行了仿真测试。
关键词:整车控制器;CAN;J1939;LabVIEW
Abstract
With the advancement of the science, and the development of electronics technology,sensor technology and computer technology,and people to the requirements of the car function are higher, on modern car there are more and more equip with electric appliances and electronics equipments,sensor, computer control unit.The traditional harnesses can not satisfy this information transmission quest,people turn to the vehicle LAN.
Controller Area Network CAN (Controller Area Network) bus is a kind of field bus, is widely used in automotive, aerospace,medical equipment and industrial control and other distributed control areas.CAN only defines the data link layer and the physical layer, and the standardization of application layer work is still in progress.In recent years, CAN bus has developed into a mainstream bus network system bus,and based on CAN bus communication protocol vehicle application layer protocol communication standard SAE J1939. J1939 agreement is the American Society of Automotive Engineers SAE (Society of Automotive Engineer) issued to CAN2.0B as the core of the network of vehicle network serial communication and control protocol. J1939 has become the largest vehicle used in a communication protocol.SAE J1939Is a high-speed communication network that is used to support real-time closed-loop control between electronic control units located in different locations in the vehicle.SAE J1939 protocol mainly includes SAE J1939-21 data link layer sub-protocol,J1939-71 application layer sub-protocol and SAE J1939-81 network management layer sub-protocol. Expounded the J1939 in the identifier format and usage,three communication methods. [资料来源:http://think58.com]
This paper first starts with the vehicle controller of pure electric vehicle, summarizes the structure, working mode and function requirements of the vehicle controller, and then introduces the development history of CAN bus, the six technical characteristics and the CAN bus network stratification and reporting Text transmission, the frame format and data error detection made a more detailed description. Chapter 4 analyzes the various levels of J1939: physical layer, data link layer, network management layer and automobile application layer. With reference to J1939 protocol, CAN high-level protocol of automobile network control and control system is designed and implemented. Finally, simulation tests were carried out with LabVIEW.
Key Words: VCU;CAN;J1939; LabVIEW
[版权所有:http://think58.com]
目录
第1章绪论 1
1.1 设计目的意义及国内外研究现状 1
1.1.1目的意义 1
1.1.2 国外研究状况 2
1.1.3 国内研究状况 3
第2章纯电动汽车整车控制器概述 4
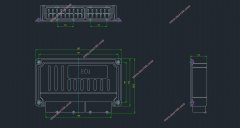
2.1 整车控制器概念 4
2.2 整车控制器结构组成 4
2.3 整车控制器功能需求 5
2.4 整车控制器的工作模式: 5
2.5 整车控制器主要功能 6
2.6 本章小结 7
[资料来源:http://think58.com]
3.1 CAN总线协议 8
3.1.1 CAN总线概述 8
3.1.3 CAN总线的优势 9
3.2 CAN总线发展历史及特点 10
3.2.1 CAN总线发展历史 10
3.2.2 CAN总线六大特点 11
3.2.3 CAN应用举例 12
3.3 CAN总线的网络分层 12
3.3.1 物理层 12
3.3.2数据链路层 12
3.3.3 CAN 应用层介绍 13
3.4 CAN技术介绍 15
3.4.1 位仲裁 15
3.4.2 CAN与其它通信方案的比较 15
3.5 CAN的报文传输 16
3.5.1 帧类型 16
3.5.2 数据错误检测 20
3.5.3硬同步和重同步 21
3.6 汽车网络系统应用层协议 21
3.6.1J1939协议概述 21
3.6.2 J1939协议具有如下特点 22
3.7 J1939 通信协议网络分层 22
[资料来源:http://think58.com]
3.8 J1939协议的编码规则 24
3.9 参数规定 25
3.10 整车控制器报文 28
3.10.1 MCS1控制报文(0x6400) 28
3.10.2 BMS控制报文 29
3.11 电机控制器 30
3.11.1 电机控制器 30
3.12 电池管理系统 33
3.13 扩展格式(CAN2.0B)说明 35
3.13.1 物理层遵循的原则 35
3.13.2数据链路层遵循的原则 35
3.13.3 应用层遵循的原则 36
3.14 本章小结 37
第4章整车控制器硬件电路设计 39
4.1 电控系统的组成及工作原理 39
4.1.1 电控系统的组成 39
4.1.2 电控系统的工作原理 39
4.2 整车控制器的功能模块组成及工作原理 39
4.3 CAN收发程序 42
4.3.1 CAN发送程序 42
4.3.2 CAN接收程序 45
4.4 本章小结 48
第5章搭建试验平台测试设计的CAN通讯协议 49
5.1 搭建测试平台并测试 49
5.2 本章小结 50
第6章结论与展望 51
6.1 研究结论 51
6.2 研究展望 51
参考文献 52
致谢 53
[来源:http://think58.com]